Through the OPEVA project, funded under the EU CHIPS Act, we’re advancing the understanding of energy efficiency in autonomous electric vehicles using comprehensive simulation environments. Using the CARLA simulator, our research demonstrates detailed energy consumption analysis of autonomous vehicles under various real-world conditions, integrating artificial intelligence (AI) for autonomous navigation, robust energy monitoring systems, and sophisticated sensor configurations.
Setting Up the Environment and Vehicle Configuration
In this study, we developed a comprehensive testing environment using CARLA simulator to analyze energy consumption patterns in autonomous electric vehicles. We configured an EV vehicle with various following features and attributes:
- RGB camera with adjustable FPS (5-30 fps)
- LIDAR sensor with adjustable FPS (5-20 fps)
- Custom power consumption modeling based on real-world EV characteristics
- Automatic vehicle control system maintaining consistent 80 km/h speed
The vehicle was equipped with real-time monitoring capabilities, tracking:
- Vehicle speed and acceleration
- Power consumption and regenerative braking
- Distance traveled
- Sensor performance metrics
- Battery level simulation

Test Scenarios and Environmental Conditions
We conducted extensive testing across various environmental conditions to understand their impact on energy consumption:
- Weather Scenarios:
- Sunny (Clear conditions, optimal visibility)
- Foggy (50% fog density, reduced visibility)
- Rainy (60% precipitation, wet roads)
- Afternoon (Low sun angle)
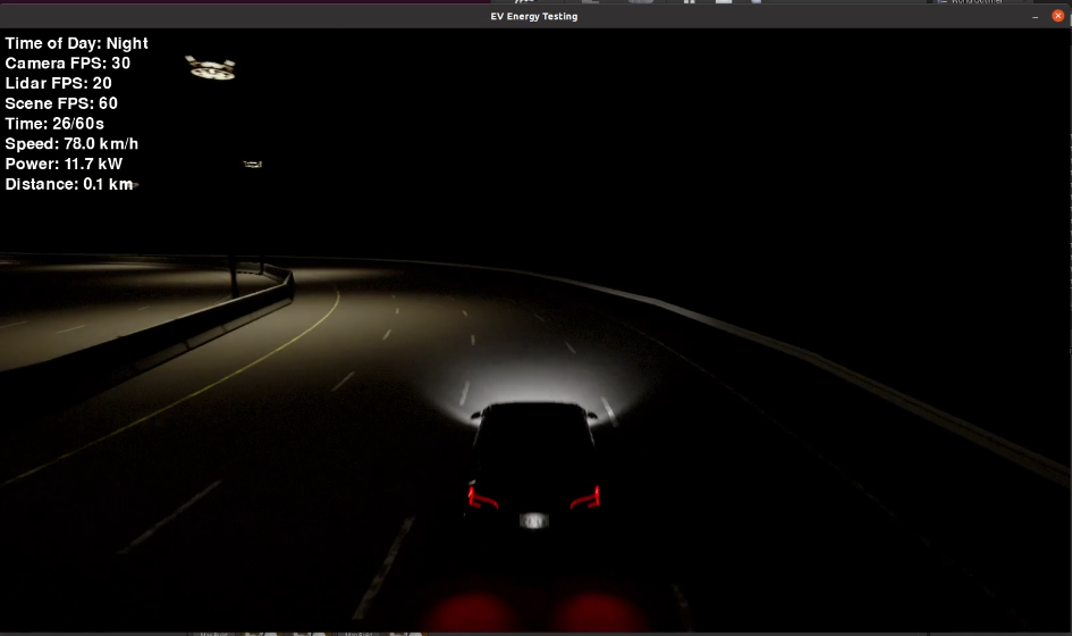
- Night (Complete darkness with automatic headlight control)
- Sensor Configurations:
- High Performance: Camera 30 FPS, LIDAR 20 FPS
- Medium Performance: Camera 15 FPS, LIDAR 10 FPS
- Low Performance: Camera 5 FPS, LIDAR 5 FPS
Each test scenario runs for 60 seconds, collecting detailed data within the scope of the following cases:
- Energy consumption patterns
- Impact of weather on vehicle performance
- Sensor configuration effects on power usage
- Vehicle behavior under different conditions




Our comprehensive simulation testing using CARLA revealed significant insights into autonomous vehicle energy consumption patterns across various environmental conditions and sensor configurations. The analysis showed that Sunny, Afternoon, Rainy, and Foggy scenarios demonstrated higher energy efficiency compared to Night conditions, where increased power demands for lighting and sensor processing led to lower efficiency. A notable trend emerged regarding sensor configurations: lower frame rates (5 FPS) for both Camera and LiDAR sensors generally resulted in better energy efficiency across all scenarios, suggesting that reduced sensor data processing demands contribute to power conservation. These findings provide valuable insights for optimizing autonomous vehicle operations, particularly in balancing sensor performance with energy efficiency. Understanding these relationships between environmental conditions, sensor configurations, and energy consumption helps advance the development of more efficient autonomous electric vehicles, supporting sustainable urban mobility solutions.



{kind=link}
{kind=link}
{kind=link}
{kind=link}